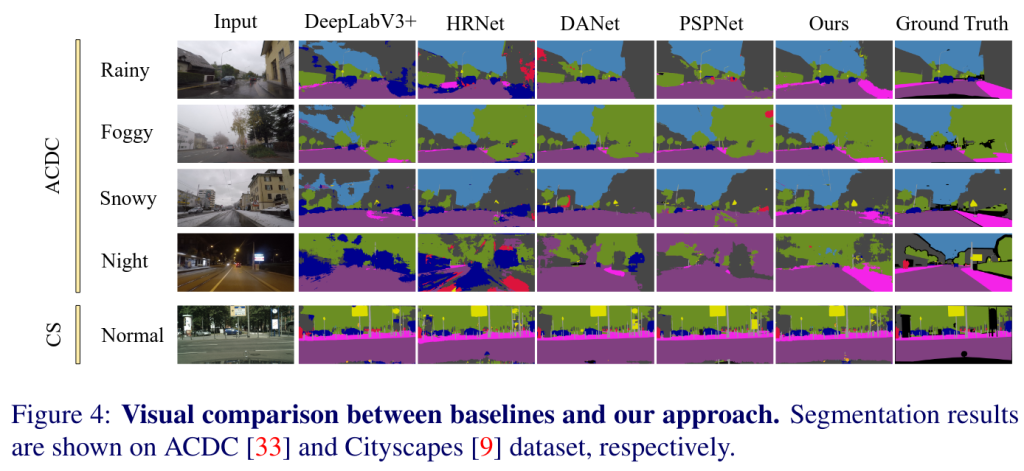
We will soon present at BMVC 2022 our work “Semantic Segmentation under Adverse Conditions: A Weather and Nighttime-aware Synthetic Data-based Approach”. This work presents a novel algorithm for harnessing synthetic data in order to improve semantic segmentation in real images.
Our work is freely available here. Our source code, simulator, and new dataset can also be obtained freely at https://github.com/lsmcolab/Semantic-Segmentation-under-Adverse-Conditions.