Model predictive control structures in the non-minimal state space
Lancaster University, Doctor of Philosophy, 2008
Supervisor: C.J. Taylor
Abstract
This thesis is concerned with constraint handling for systems described by a Non-Minimal State Space (NMSS) form. Such NMSS models are formulated directly from the measured input and output signals of the controlled process, without resort to the design and implementation of an observer. The thesis largely focuses on the application of Model Predictive Control (MPC) methods, a very common technique for dealing with system constraints. It is motivated by earlier research into both NMSS and MPC systems, with features of both combined in this thesis to yield improved control.
The main contribution lies in the development of new methods for constraint handling of NMSS/MPC systems that contrasts with the ad hoc approach previously used for NMSS design based on the Proportional-Integral-Plus (PIP) algorithm. Structural aspects of NMSS/MPC design are considered, that result from mathematical manipulation of the closed-loop block diagram or from the definition of the state space description. The properties of these structures are investigated to provide an insight on features of the proposed strategies.
More specifically, a Reference Governor scheme is utilised as a supervisory controller to account for constraints. This can lead to constraint handling in cases where a controller is already available. Furthermore, the use of an internal model is considered in the case of the “Forward Path” NMSS/MPC controller that is shown to have improved robustness properties in comparison to the conventional “Feedback” structure. In contrast to existing internal model approaches, this technique utilises the NMSS structure of the state vector and estimates only the elements of the state vector that are related to past values of the output. In addition, an optimal tuning technique is presented for MPC controllers. This approach allows for multiple objectives to be specified, whilst satisfying any system constraints. It is also shown that a specific NMSS/MPC structure that is proposed in this thesis, namely the NMSS/MPC controller with an integral-of-error state, provides the designer with additional freedom when using this tuning method.
New NMSS/MPC methods are presented for both linear and non-linear systems, with the latter case being described by State Dependent Parameter (SDP) models. The development and analysis of MPC/SDP control in this thesis represents the first constraint handling control system and associated stability results for this class of non-linear models. Simulation examples are used to illustrate the advantages and potential limitations of the various control structures in comparison to existing solutions.
Other research
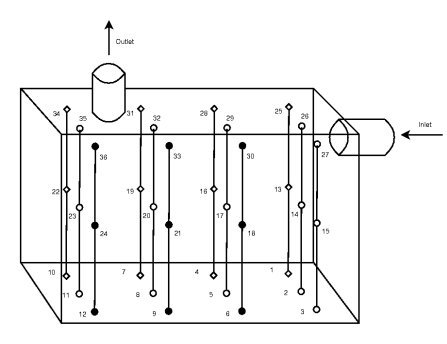
Although not directly part of the above PhD thesis, the research was extended to consider system identification methods, with application to on-line monitoring of animal health in agricultural buildings in order to improve animal welfare. The latter research was carried out in collaboration with M3-Biores at Katholieke Universiteit Leuven and the Department of Veterinary Science and Technology for Animal Safety at the University of Milan. It is common practice by veterinarians to assess cough sounds in pig houses for diagnostic purposes. Hence, this project was concerned with the development of time series methods for the automatic identification, localisation and classification of sick pig cough sounds.