Funding: NNL-NDA, £90k, 2015–2019
Investigators: Professor C J Taylor (PI), Dr A Montazeri
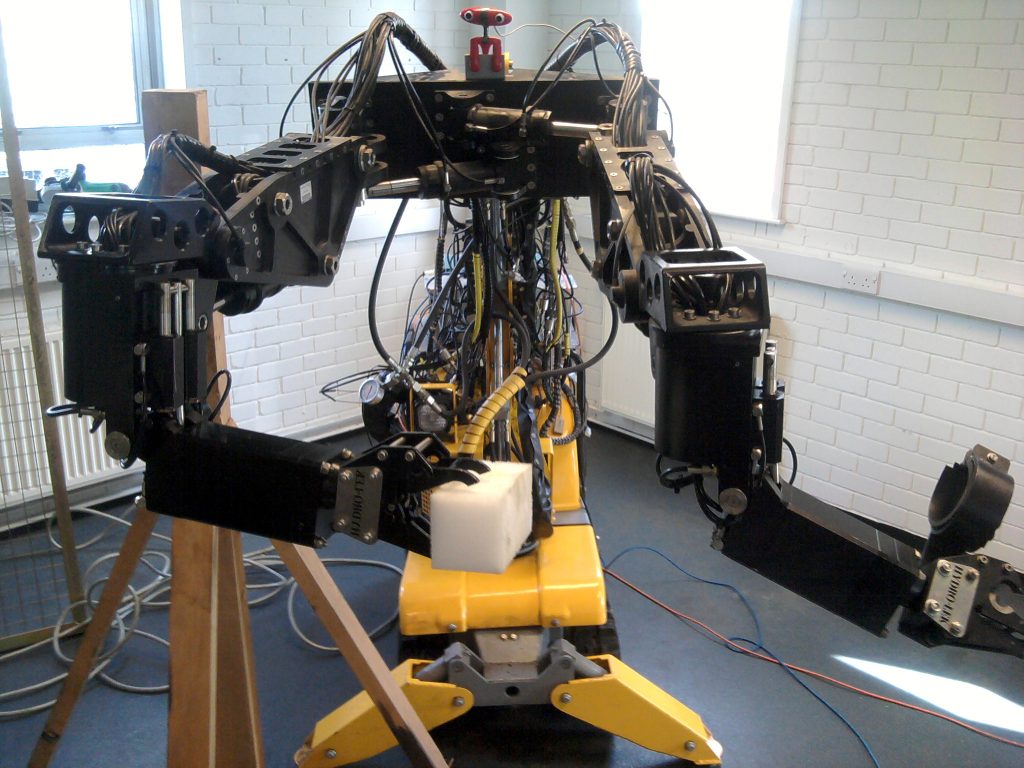
The aims of this project are: to research a next-generation Brokk-based robotic manipulator that has already facilitated technology transfer between the University, the NNL and Sellafield Ltd; to develop systems that will allow the robot to better understand the environment around it, based on object depth perception, force feedback, etc., and to use these to develop novel autonomous robotic systems with improved operation via touch screen controller interfaces; and to design control algorithms for manipulators that will address inherent uncertainty in the application case study environments including welding, pipe cutting and material discrimination. The case study system is a BROKK-40 decommissioning robot, consisting of a moving vehicle with a single 5 degree-of-freedom manipulator, hydraulic tank and remote control device. Attached to the BROKK are two HydroLek seven-function manipulators, i.e. each with six rotary joints and a gripper.