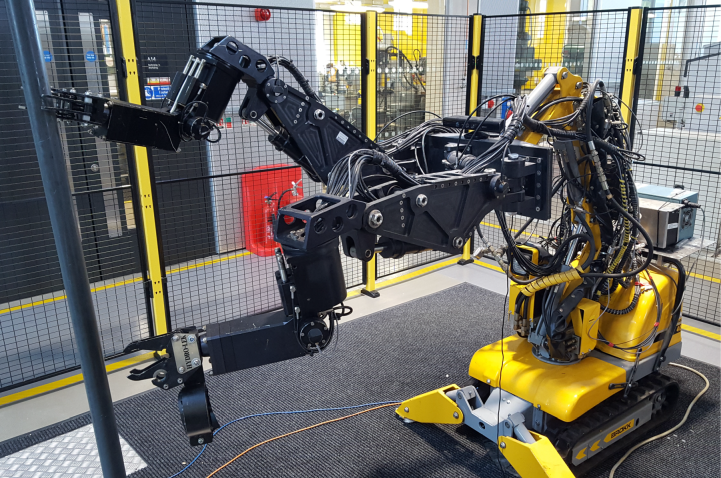
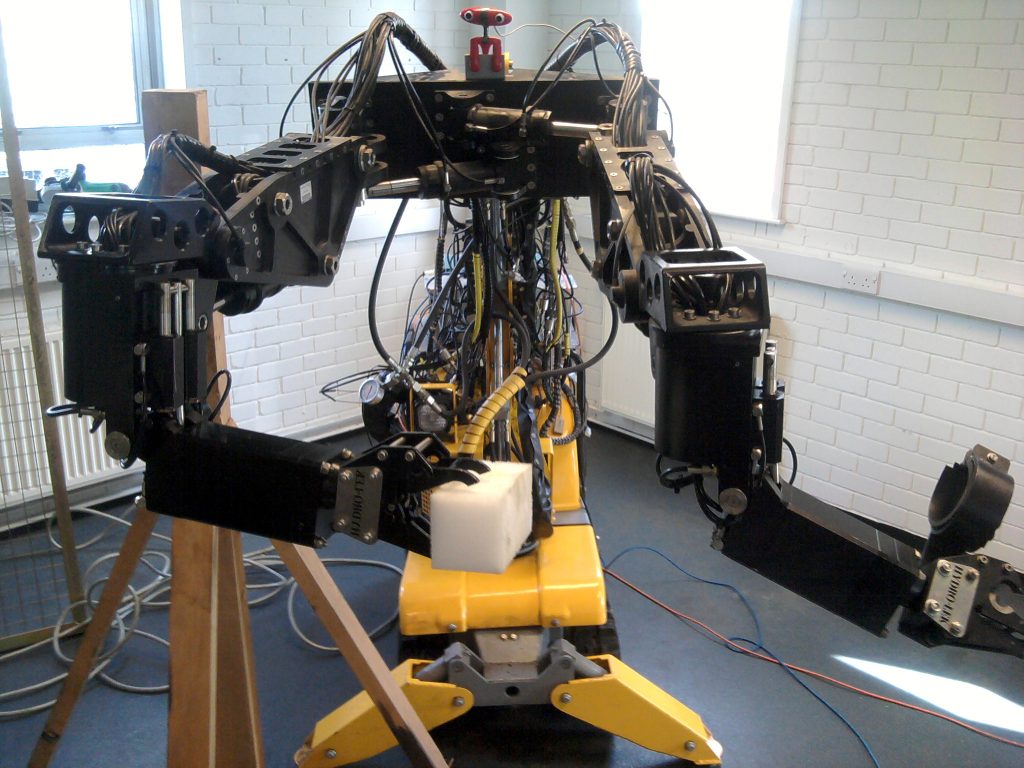
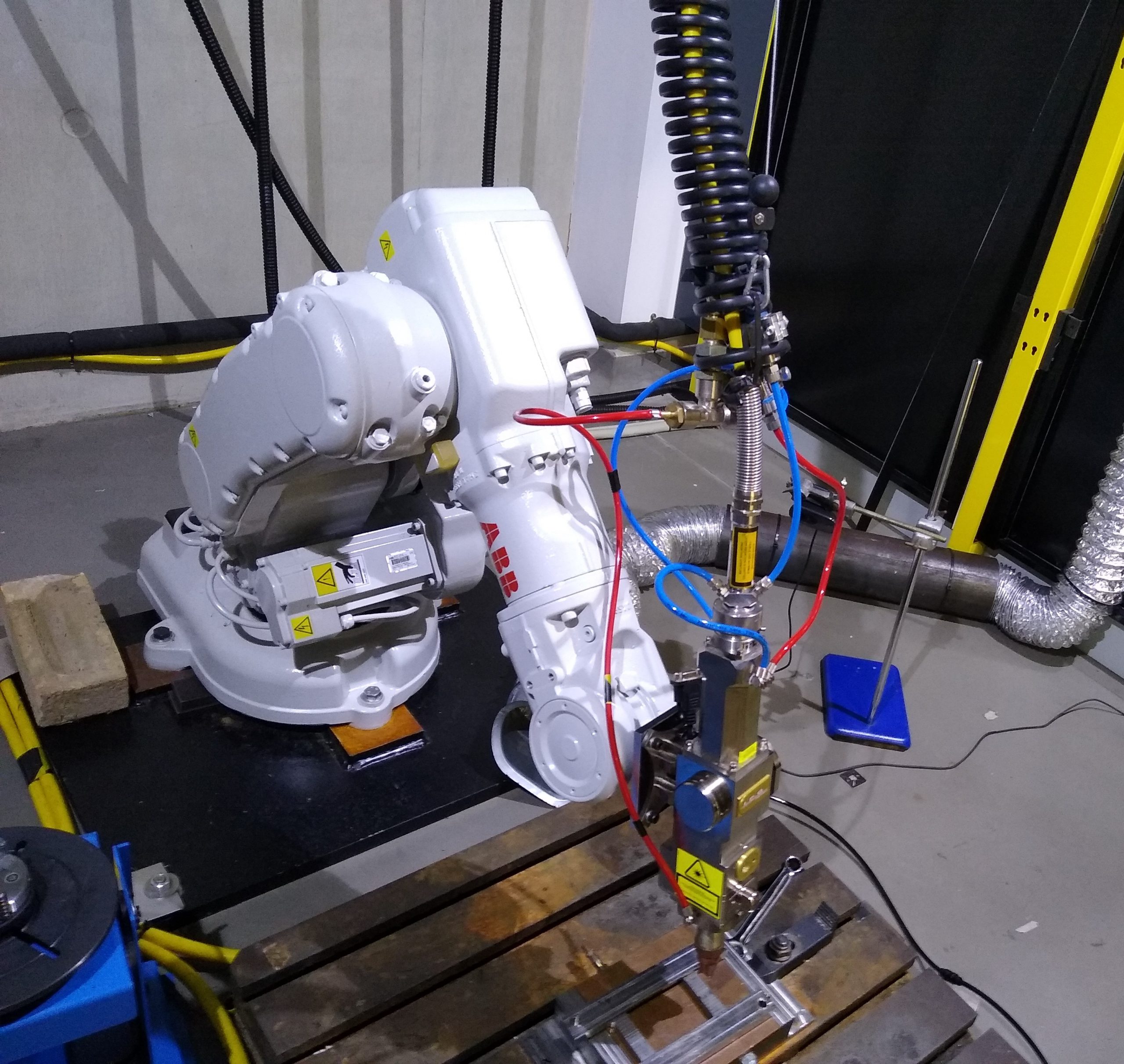
Welcome. This web page is cited in some of our articles and includes various pictures of the robotic systems used for research into nuclear decommissioning, control, laser cutting and the human-machine interface. One system is based on a BROKK-40 demolition robot, consisting of a moving vehicle with a single five degree of freedom manipulator, hydraulic tank and remote control device. The multi-arm system takes the form of two seven-function Hydro-Lek HLK-7W manipulators, i.e. each with six rotary joints and a gripper. We also use Universal UR3 and UR5 robots, and an ABB 6 axis manipulator.
BROKK and HYDROLEK
Universal UR5 with Quanser Haptics

ABB 6-axis manipulator with laser
Laboratory configuration

Older photographs


