Funding: EPSRC (NCNR Flexible Fund), £100k, 2019–2021
Investigators: Dr A Montazeri (PI), Professor C J Taylor
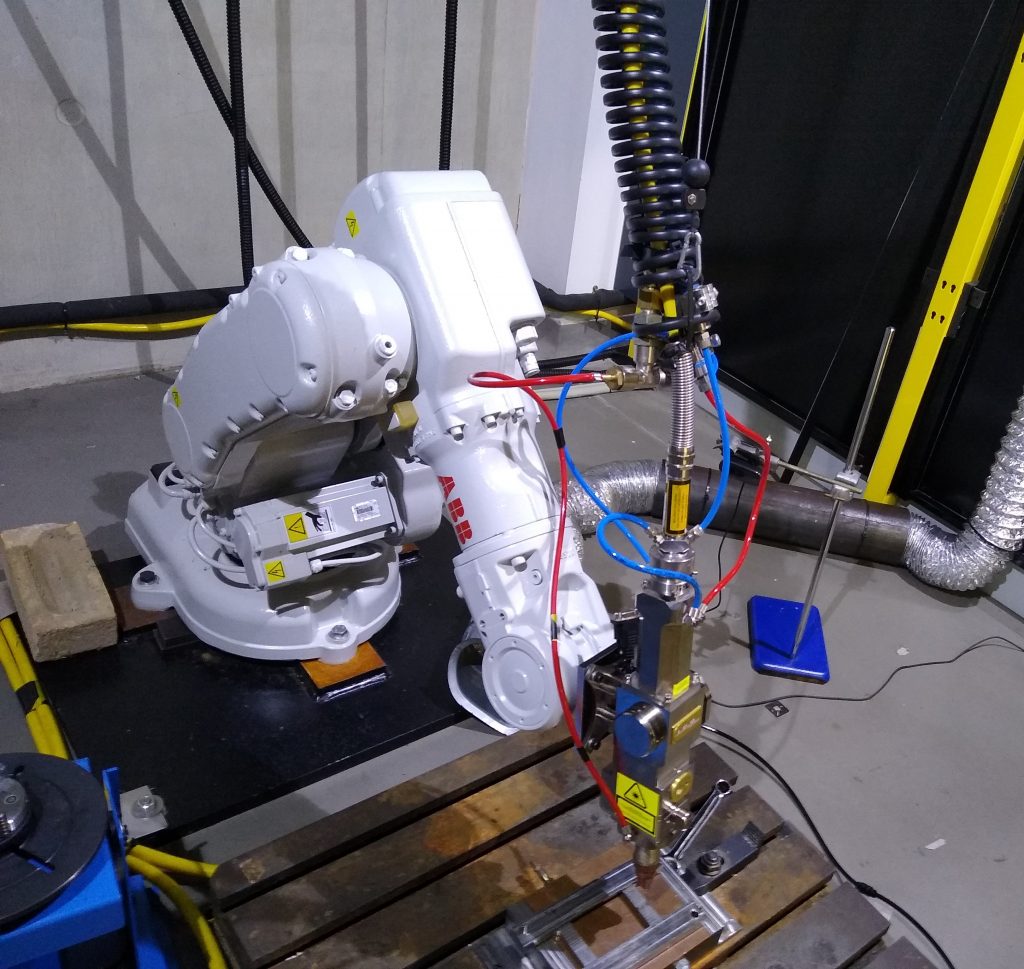
This is a flexible funds project within the National Centre for Nuclear Robotics (NCNR). The project has three key objectives, as follows: improve the situational awareness of a laser cutting robotic manipulator by using a mobile vision system installed on an Unmanned Aerial Vehicle (UAV); develop an artificial intelligent algorithm to generate a real-time collision free trajectory for laser cutting for highly redundant robots; and integrate the trajectory planning and vision algorithm in a simulation environment in ROS.